

De noodzaak om de kosten van het klaarzetten van bestellingen terug te brengen heeft als gevolg dat tegenwoordig steeds vaker orderpickoplossingen gebaseerd op automatische systemen worden toegepast. De reden hiervoor is dat deze manier van werken grote voordelen biedt, zoals: minder magazijnmedewerkers, een perfecte controle en beheer van de voorraden, de mogelijkheid om zeer hoge magazijnen te bouwen, de afwezigheid van afhandelingsapparatuur voor de orderpicking, enzovoort. De goederen die in dit soort systemen worden opgeslagen hebben over het algemeen een gemiddelde omzetsnelheid en vormen vaak een aanvulling op bestellingen met complete pallets.
In principe zijn er vier mogelijke configuraties voor automatische orderpicking vanaf pallets:
- Het inrichten van picklocaties aan de voorkant van een automatisch magazijn
- Het inrichten van picklocaties aan de zijkant van een automatisch magazijn
- Het inrichten van picklocaties in aangrenzende zones
- Automatische orderpicking met robots
Elk van deze systemen wordt hieronder besproken.
Picklocaties aan de voorkant van een automatisch magazijn
Deze oplossing wordt het meest gebruikt wanneer het kleine of middelgrote magazijnen betreft waar orderpicking niet de belangrijkste activiteit is. Verschillende oplossingen kunnen worden toegepast al naargelang het aantal bestellingen dat moet worden klaargezet, aangezien elk van deze oplossingen op verschillende manieren toegepast kan worden en een andere productiviteit geeft. Iedere situatie vereist een specifieke analyse om te bepalen welke configuratie het meest geschikt is. De onderstaande afbeelding toont een voorbeeld van hoe een zone voor orderpicking aan de voorkant er uit kan zien.

Picklocaties aan de voorkant van een automatisch magazijn
Picklocaties aan de zijkant van een automatisch magazijn
De configuratie van dit alternatief is gebaseerd op doorrolstellingen op vloerniveau aan de zijkant van een automatisch magazijn, die naar de buitenkant gericht zijn, naar het gangpad, zoals te zien is op onderstaande foto.

Orderpicksystemen aan de zijkant van een automatisch magazijn.
Pallets met de hoogste omzetsnelheid worden in deze doorrolstellingen geplaatst. Per opslagkanaal kunnen twee tot drie pallets worden opgeslagen. De complete reservepallets bevinden zich in stellingvakken, voornamelijk boven deze doorrolstellingen zodat de magazijnkraan de lege pallets op de rollenbanen kan vervangen door volle.
De magazijnmedewerker gaat bij het orderpicken met een pompwagen of orderpicktruck, langs de gehele zijkant van de automatische stellingen in het magazijn. Het orderpicken van de overige producten, die zich in de andere gangpaden bevinden en een lagere omloopsnelheid hebben gebeurt op de picklocaties aan de voorkant van de magazijnstellingen.
Het orderpicksysteem aan de zijkant kan worden gecombineerd met pick-to-light voorzieningen waardoor de productiviteit met betrekking tot het klaarzetten van bestellingen wordt verhoogd.
Orderpicking in aangrenzende zones
Een goede oplossing voor producten met een hoge omloopsnelheid, is een orderpickzone met doorrolstellingen voor pallets aan beide zijden van het gangpad. Hiermee kan tevens de tijd die nodig is voor het klaarzetten van bestellingen teruggebracht worden. De afhandeling vindt plaats door middel van magazijnwagens die de opslagkanalen aanvullen.
De reservepallets worden opgeslagen in een automatisch warehouse voorzien van een magazijnkraan. De verbinding tussen het magazijn en de aangrenzende zones voor orderpicking vindt plaats door middel van rollenbanen, magazijnwagens of automatisch geleide voertuigen (AGV) en laser geleide voertuigen (LGV).
De aanbevolen apparatuur voor goederenafhandeling voor de magazijnmedewerkers zijn de elektrische heftruck of de orderpicktruck (man-down).

Voorbeeld van de verspreiding van de picklocaties in een automatisch magazijn

Automatische orderpicking via robots
Voor grootschalige orderpicking en als aanvulling op automatische magazijnen, kunnen orderpickrobots worden geïnstalleerd. Deze robots zijn in staat dozen per stuk of per complete laag automatisch af te handelen.

Antropomorfische robot voor de afhandeling van pallets
Er zijn drie typen robots: de antropomorfische robot, de portaalrobot met twee assen en de portaalrobot met drie assen. De keuze voor het inzetten van een van deze typen, hangt voornamelijk af van het aantal cycli dat men per uur wil uitvoeren en van de combinatie van de bestellingen:
- Antropomorfische robots zijn in staat 360° te draaien en beschikken elk over een grijparm die verschillende bewegingen kan combineren. Hiermee hebben ze toegang tot alle dozen en opslaglagen die binnen hun bereik liggen. Het functioneringsschema is ongeveer gelijk aan dat van de afbeelding hieronder, dat een automatisch orderpicksysteem toont met een robot:

- Portaalrobots met twee assen beschikken over een vaste grijparm die zich alleen verticaal kan bewegen. De slede waarop deze arm is bevestigd beweegt horizontaal over het portaal, zodat de robot elke positie kan bereiken. De robot heeft toegang tot meerdere pallets, die over het algemeen op vier of vijf opslagposities geplaatst zijn.
Het functioneringsschema wordt door de volgende afbeelding geïllustreerd:
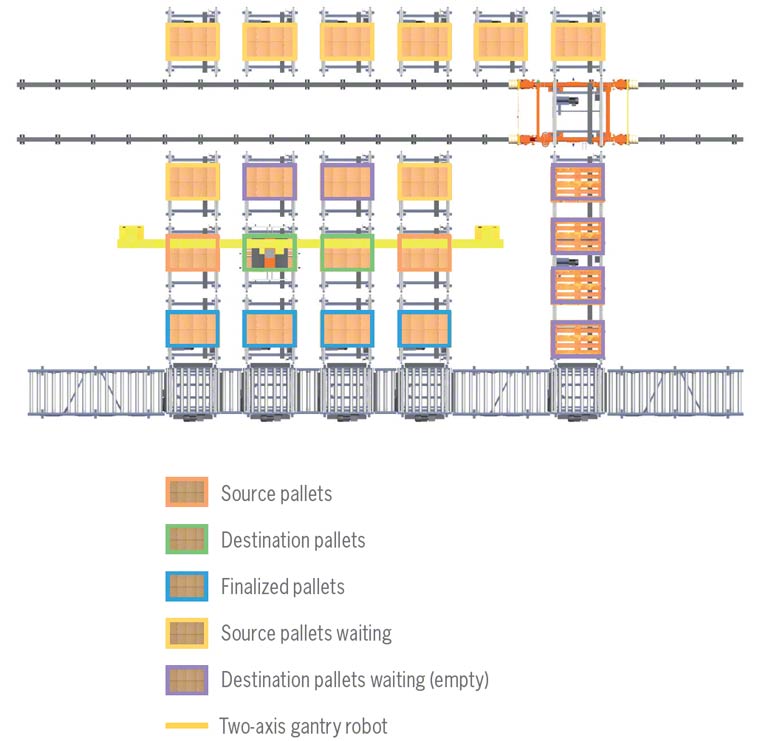

Afbeelding van een portaalrobot met twee assen

Afbeelding van een portaalrobot met drie assen
- Portaalrobots met drie assen werken op dezelfde manier als die met twee assen, maar het complete portaal verplaatst zich langs een derde as via een zijstructuur. Hierdoor heeft de machine toegang tot twee verschillende niveaus, die ieder tot een laad- of lospositie behoren. Dit resulteert in een grotere diversificatie van de bestellingen en een groter aantal.
Hieronder wordt het functioneringsschema geïllustreerd:
